
CSD5-02BX1 сервопривод Б/у 85% внешний вид нового Бесплатно Доставка - купить по
12600


Сохраните в закладки:



*История изменения цены! Указанная стоимость возможно, уже изменилось. Проверить текущую цену - >
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Sep-17-2025 | 179.41 руб. | 188.45 руб. | 183.5 руб. |
| Aug-17-2025 | 177.28 руб. | 186.43 руб. | 181.5 руб. |
| Jul-17-2025 | 149.45 руб. | 156.70 руб. | 152.5 руб. |
| Jun-17-2025 | 174.70 руб. | 183.58 руб. | 178.5 руб. |
| May-17-2025 | 152.69 руб. | 160.89 руб. | 156 руб. |
| Apr-17-2025 | 171.88 руб. | 180.37 руб. | 175.5 руб. |
| Mar-17-2025 | 170.66 руб. | 179.43 руб. | 174.5 руб. |
| Feb-17-2025 | 168.67 руб. | 176.91 руб. | 172 руб. |
| Jan-17-2025 | 167.67 руб. | 175.16 руб. | 171 руб. |
Новые товары
Характеристики
Описание товара
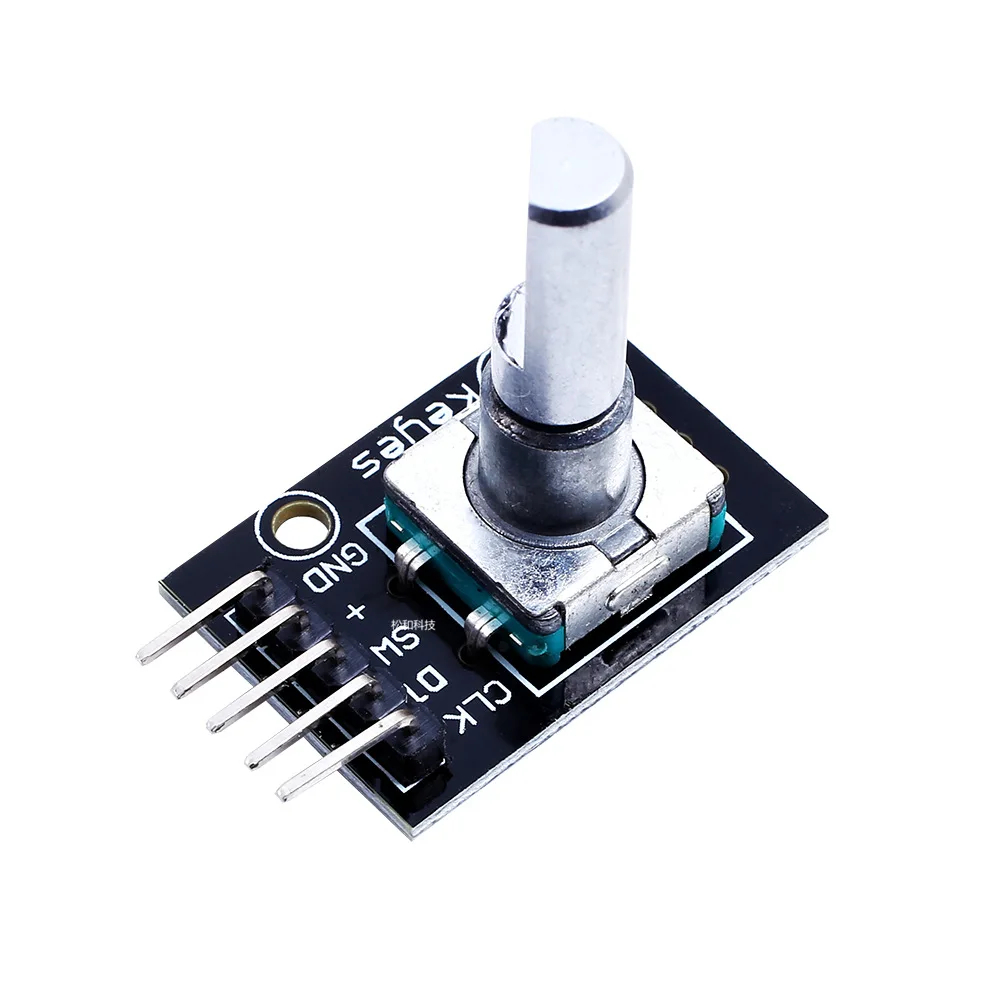
Модуль энкодера-nbsp;
Рабочее напряжение: 5 В
Количество импульсов в круге: 20
Вращающийся датчик можно поворачивать, чтобы подсчитать количество импульсов, выходящих во время вращения в положительных и противоположных направлениях. Количество оборотов не соответствует потенциометру. Это количество оборотов неограничено. С ключами на вращающийся датчик его можно сбросить в исходное состояние., то есть от0Начинают рассчитывать.
Принцип работы:
Инкрементный энкодер-это поворотный датчик, который преобразует вращательное смещение в ряд цифровых импульсных сигналов. Эти импульсы используются для регулирования углового смещения.EltraПринцип фотоэлектрического сканирования используется для преобразования углового смещения в энкодере. Система чтения основана на вращении радиального циферблата (кодовый диск), состоящего из чередующихся световых передающих окон и световых плотных окон при вертикальном освещении инфракрасным источником света, который проецирует изображение кодовый диск на поверхность приемника. Приемник покрывает слой Дифракционный решетчатый, который имеет ту же ширину окна, что и кодовый диск. Работа приемника заключается в том, чтобы почувствовать изменение поворота оптического диска, а затем преобразовать свет в соответствующее электрическое изменение. Затем сигнал низкого уровня поднимается на более высокий уровень и генерируется квадратный импульс без каких-либо помех, который должен быть обработан с помощью электронной цепи. Система чтения обычно принимает дифференциальный режим, т. е., два сигнала являются тем же, но разность фаз180Различные сигналы сравниваются для улучшения качества и стабильности выходного сигнала.
Энкодера:

Инкрементный энкодер дает двухфазную квадратную волну, их фазовую разницу90°, Обычно называемыйAКанал иBПроход. Один из каналов дает информацию, связанную со скоростью, в то время как два канала сигналов сравниваются последовательно, чтобы получить информацию о направлении вращения. Есть также специальный сигнал под названиемZИли 0 каналов, канал дает абсолютный 0-битный кодер, и этот сигнал является квадратной волной сAЦентральная линия канала квадратной волны совпадает.

Точность инкрементного кодировщика зависит как от механических, так и от электрических факторов, таких как погрешность решетки, эксцентриситет диска, эксцентриситет подшипника, погрешность, введенная электронным считывающее устройство и неточность оптической части. Единица измерения для определения точности энкодера-это степень электричества, точность энкодера определяет счет импульса, генерируемый энкодером. Далее используется для указания поворота механического вала с большим количеством электрических градусов, а вращение вала должно быть полным периодом. Чтобы узнать, сколько механический угол эквивалентен 360 градусам на электрике, можно использовать следующую формулу для расчета: electrical 360 = mechanical 360 °/n° pulse/Turn

Рисунок: сигнал, когда a, b является коммутативным
Ошибка разделения кодировщика представлена максимальным смещением двух непрерывных импульсных волн в единицах электрического угла. Ошибка существует в любом кодировщике. Это вызвано вышеуказанными факторами. Максимальная погрешность энкодера Eltra составляет ± 25 электрического угла (при любом указанном состоянии), что эквивалентно смещению номинального значения ± 7%, максимальное отклонение двух каналов с разницей в фазе 90 ° (электрически) составляет ± 35.
Инкрементный энкодер для сигнала UVW
В дополнение к традиционным кодерам, упомянутым выше, некоторые инкрементные кодерами интегрированы с другими электрическими выходными сигналами. Примерами являются инкрементные кодеры, интегрированные с сигналами UVW, которые обычно применяются отзывы сервомоторов переменного тока. Эти полюсные сигналы обычно появляются в сервоприводах переменного тока. Сигналы UVW, как правило, разработаны путем имитации функций магнитные компоненты. В Eltra кодирования. В устройстве эти сигналы UVW генерируются оптическим методом и появляются в виде трех квадратных волн, которые смещают друг друга на 120 градусов. Для того, чтобы облегчить запуск двигателя-up, стартер для управления двигателем нуждается в этих правильных сигналах. Эти полюсные импульсы UVW могут многократно повторяться при вращении механической оси, поскольку они напрямую зависят от количества полюсов, подключенных к двигателю, и используются для сигналов UVW 4, 6 или более полюсных двигателей.
***************************************************************************
Arduino Тесты товара:
Int redPin = 2;
Инт йеллоупин = 3;
Int greenPin = 4;
Int aPin = 6;
Int bPin = 7;
Int buttonPin = 5;
Инт-состояние = 0;
Int longPeriod = 5000;/время в зеленом или красном цвете
Int shortPeriod = 700;/период времени при изменении
Int targetCount = короткий период;
Int count = 0;
Недействительными установки ()
{
PinMode (aPin, вход);
PinMode (bPin, вход);
PinMode (buttonPin, вход);
PinMode (redPin, выход);
PinMode (yellowPin, выход);
PinMode (greenPin, выход);
}
Недействительными петля ()
{
Количество + +;
If (digitalRead (buttonPin)
{
Комплекты (высокие, высокие, высокие);
}
Еще
{
Int change = getEncoderTurn ();
Int newPeriod = длинный период + (изменение * 1000);
If (новый период> = 1000 & новый период <= 10000)
{
LongPeriod = newPeriod;
}
If (count> targetCount)
{
Выполнении функция setState ();
Count = 0;
}
}
Задержка (1);
}
Int getEncoderTurn ()
{
/Возврат-1, 0 или + 1
Статический Инт oldA = низкий;
Статический Инт oldB = низкий;
Результат int = 0;
Int newA = digitalRead (aPin);
Int newB = digitalRead (bPin);
If (newA! = oldA | newB! = oldB)
{
/Что-то изменилось
Если (oldA = LOW & newA = HIGH)
{
Результат =-(oldB * 2-1);
}
}
OldA = newA;
OldB = newB;
Возвращение результат;
}
Int выполнении функция setState ()
{
Если (Состояние = 0)
{
Комплект (высокий, низкий, низкий);
TargetCount = longPeriod;
Состояние = 1;
}
Иначе если (Состояние = 1)
{
Комплекты (высокие, высокие, низкие);
TargetCount = shortPeriod;
Состояние = 2;
}
Иначе если (Состояние = 2)
{
Комплекты (низкие, низкие, высокие);
TargetCount = longPeriod;
Состояние = 3;
}
Иначе если (Состояние = 3)
{
Комплекты (низкие, высокие, низкие);
TargetCount = shortPeriod;
Состояние = 0;
}
}
Пустые комплекты (int красный, int желтый, int зеленый)
{
DigitalWrite (красный, красный);
Цифровой (желтый, желтый);
DigitalWrite (greenPin, зеленый);
}



Ключ пришёл быстро. Заказал для своего авто. Цена не высокая, для такого девайса. Долго искал в... Читать отзыв полностью...

Давно хотела себе именно такие часы. В золотом корпусе с украшениями. Если сказать буквально в нескольких словах, то они просто... Читать отзыв полностью...
Просто чудесные серьги. По-другому и не скажешь. Нисколько не пожалела, что оформила заказ именно на них. Качество просто супер, если... Читать отзыв полностью...

Здравствуйте, можно ли приобрести отдельно комплект проводов для подключения андройд устройства БМВ е60 ССС?... Читать отзыв полностью...

От магазина один негатив! Товар не получил! Прошло 9 месяцев! Все споры закрыл сам магазин! Обещал 30 раз повторные поставки... Читать отзыв полностью...

Извините, как зовут женщину на прикрепленной фотографии?... Читать отзыв полностью...








Хочу купить аккумулятор на смартфон ... Читать отзыв полностью...